Suivi de véhicule
Contents
Définition du modèle
On construit le modèle à partir du modèle continu. L'état contient position et vitesse dans les deux directions On suppose un bruit de modèle sur la vitesse uniquement
dt = 1; % pas de temps dF = [0 0 1 0; 0 0 0 1;0 0 0 0;0 0 0 0]; % matrice du système linéaire d'eq. diffs F = expm(dF*dt); % matrice du modèle discret sigma_q = 0.05; Q = sigma_q^2 * [0 0 0 0;0 0 0 0;0 0 1 0;0 0 0 1]; % On mesure uniquement la position. H = [1 0 0 0; 0 1 0 0]; sigma_r = 1; R = eye(2) * sigma_r^2;
Génération des données
L = 40; % nombre d'échantillons V = [2; 1]; % vitesse, supposée uniforme x = V * (1:L); % position au cours du temps z = x + randn(2, L) * sigma_r; % position mesurée
Initialisation
On initialise l'estimation de l'état en utilisant la première mesure pour la position, et 0 pour la vitesse. La covariance de l'estimation est prise égale à celle des mesures pour la position, et arbitrairement grande pour la vitesse.
X0 = [z(:, 1); 0 ; 0]; % première estimation de l'état P0 = diag([sigma_r sigma_r 100 100]); % covariance de l'estimation
Filtre de Kalman
[xest, Pest, K, xap] = kalman(z, F, H, Q, R, X0, P0); % Kalman
Visualisation des résultats
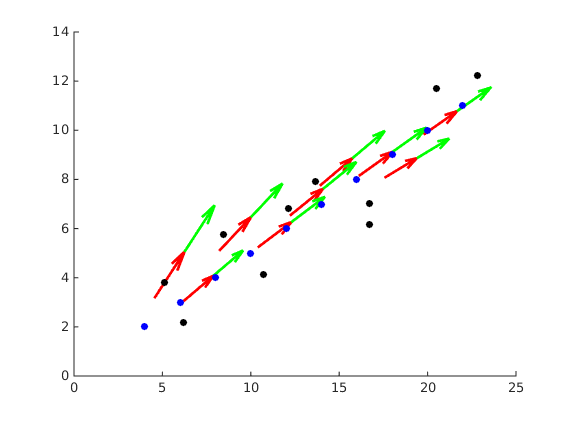
Premières estimations de l'état En rouge les estimations, en vert les prédictions position réelles en bleu position mesurées en noir
figure hold on quiver(xest(1, 1:10), xest(2, 1:10), xest(3, 1:10), xest(4, 1:10), 'r', 'linewidth', 2, 'AutoScale', 'off'); quiver(xap(1, 2:11), xap(2, 2:11), xap(3, 2:11), xap(4, 2:11), 'g', 'linewidth', 2, 'AutoScale', 'off'); scatter(z(1, 2:11), z(2, 2:11), 30, 'k', 'filled'); scatter(x(1, 2:11), x(2, 2:11), 30, 'b', 'filled');
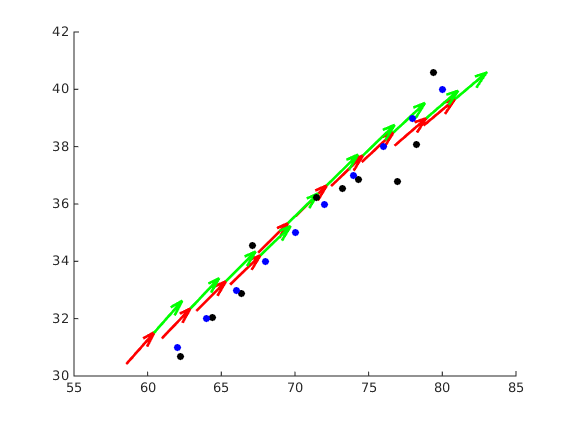
Visualisation des résultats
Après une trentaine d'itérations, le filtre converge En rouge les estimations, en vert les prédictions position réelles en bleu position mesurées en noir
figure hold on quiver(xest(1, 30:39), xest(2, 30:39), xest(3, 30:39), xest(4, 30:39), 'r', 'linewidth', 2, 'AutoScale', 'off'); quiver(xap(1, 31:40), xap(2, 31:40), xap(3, 31:40), xap(4, 31:40), 'g', 'linewidth', 2, 'AutoScale', 'off'); scatter(z(1, 31:40), z(2, 31:40), 30, 'k', 'filled'); scatter(x(1, 31:40), x(2, 31:40), 30, 'b', 'filled');