Estimation d'une constante avec le filtre de Kalman
Contents
Définition des paramètres
sigmaq = 0.001; % écart type du bruit de modèle sigmar = 0.5; % écart type du bruit de mesure F = 1; % matrice d'évolution, constante, pas d'évolution H = 1; % mesure directe de l'état Q = sigmaq^2; % covariance du bruit de modèle R = sigmar^2; % covariance du bruit de mesure
Simulation des mesures
L = 200; % longueur de la séquence z = 1 * ones(1, L) + sigmar * randn(1, L); % constante + du bruit
Filtre de Kalman
[xest, Pest, K] = kalman(z(2:end), F, H, Q, R, z(1), R);
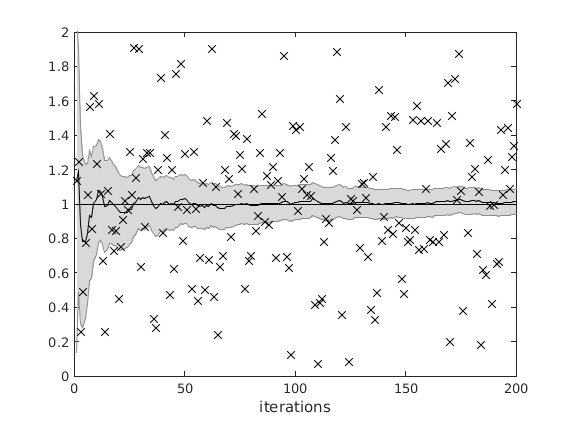
Tracé de l'estimation avec son intervalle de confiance à 95%
Xe = [z(1) xest(1,:)]; shadedErrorBar(1:L,Xe, 2*sqrt([R; squeeze(Pest)])) hold on plot(ones(L,1), 'k') scatter(1:L,z, 'k', 'x') xlim([0 L]) ylim([0 2]) xlabel('iterations')
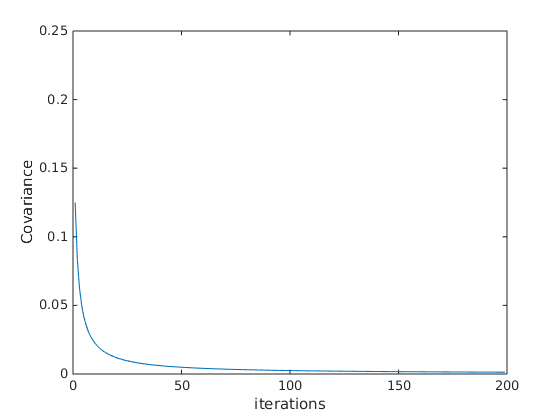
Variance de l'estimation
Au fur et à mesure des itérations, la variance de l'estimation diminue
figure plot(squeeze(Pest)) xlim([0 L]) ylim([0 sigmar^2]) xlabel('iterations') ylabel('Covariance')
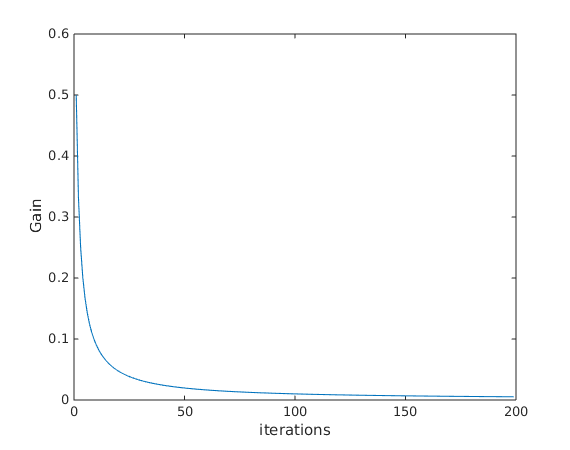
Gain de Kalman
Plus la variance de l'estimation est faible, plus le filtre de Kalman fait confiance au modèle. Ceci se traduit par un gain de Kalman de plus en plus faible.
figure plot(squeeze(K)) xlim([0 L]) ylim([0 0.6]) xlabel('iterations') ylabel('Gain')